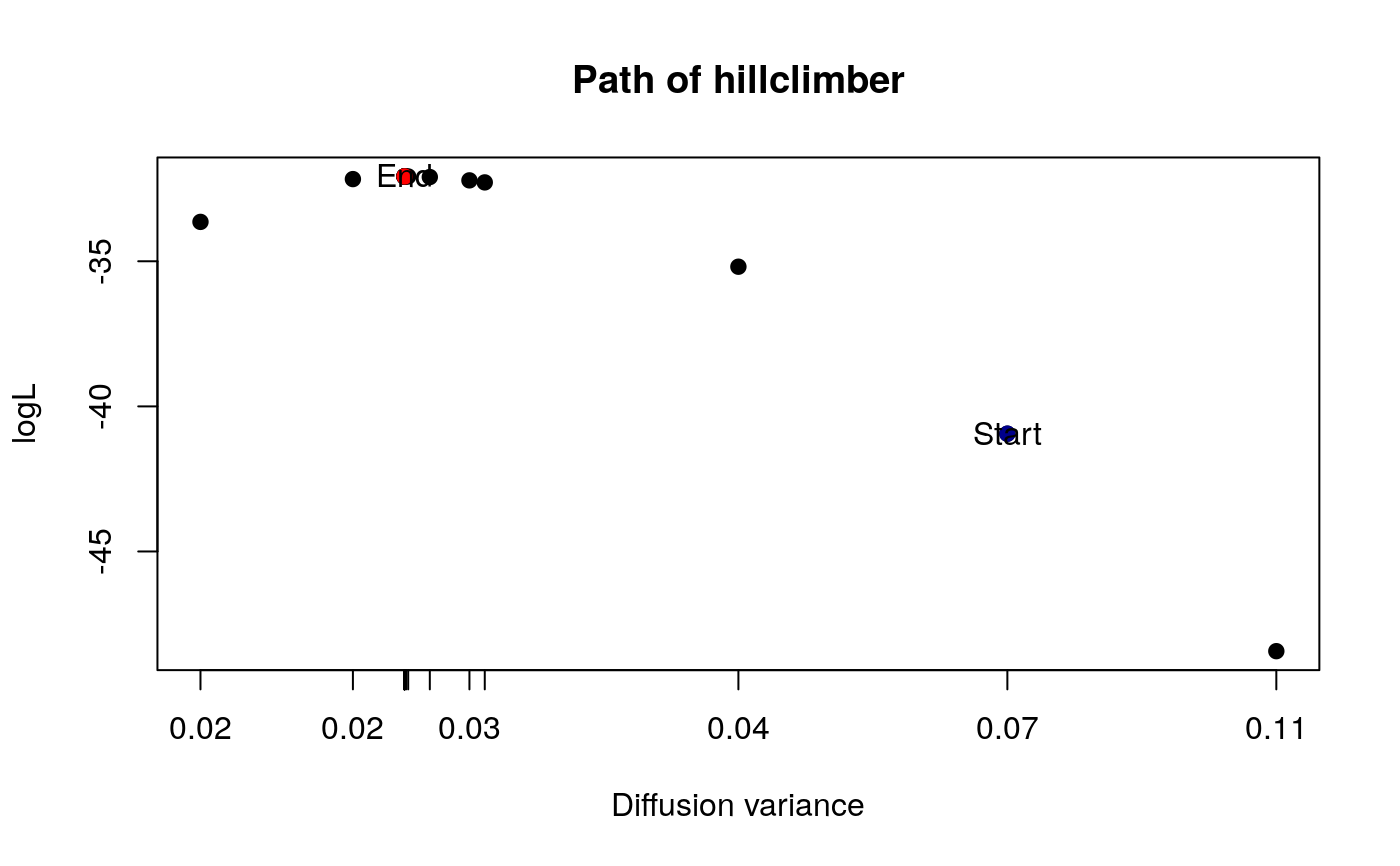
Plot the hillclimber trajectory
hillclimbplot(x, ...) # S3 method for slouch hillclimbplot(x, ...)
Arguments
| x | An object of class 'slouch' |
|---|---|
| ... | Additional arguments passed to 'plot.default(...)' |
Methods (by class)
slouch: Hillclimbplot for the 'slouch object'
Examples
library(slouch) library(ape) data(neocortex) data(artiodactyla) neocortex <- neocortex[match(artiodactyla$tip.label, neocortex$species), ] m0 <- slouch.fit(phy = artiodactyla, species = neocortex$species, response = neocortex$neocortex_area_mm2_log_mean, mv.response = neocortex$neocortex_se_squared, hillclimb = TRUE) hillclimbplot(m0)m1 <- brown.fit(phy = artiodactyla, species = neocortex$species, response = neocortex$neocortex_area_mm2_log_mean, mv.response = neocortex$neocortex_se_squared, hillclimb = TRUE) hillclimbplot(m1)